Programación dinámica
La programación dinámica es un método para
reducir el tiempo de ejecución de un algoritmo
mediante la utilización de subproblemas
superpuestos y subestructuras óptimas
Una subestructura óptima significa que se pueden usar soluciones óptimas de subproblemas para encontrar la solución óptima del problema en su conjunto.
Un problema tiene subproblemas superpuestos si se usa un mismo subproblema para resolver diferentes problemas mayores.
Los algoritmos divide y vencerás están dentro de los métodos descendentes
Empezar con el problema original y descomponerlo en pasos sucesivos en problemas de menor tamaño.
La programación dinámica por el contrario, es un método ascendente:
Resolver primero los problemas pequeños (guardando las soluciones) y después combinarlas para resolver problemas más grandes.
La programación dinámica hace uso de:







Una subestructura óptima significa que se pueden usar soluciones óptimas de subproblemas para encontrar la solución óptima del problema en su conjunto.
Un problema tiene subproblemas superpuestos si se usa un mismo subproblema para resolver diferentes problemas mayores.
Los algoritmos divide y vencerás están dentro de los métodos descendentes
Empezar con el problema original y descomponerlo en pasos sucesivos en problemas de menor tamaño.
La programación dinámica por el contrario, es un método ascendente:
Resolver primero los problemas pequeños (guardando las soluciones) y después combinarlas para resolver problemas más grandes.
La programación dinámica hace uso de:
- Subproblemas superpuestos
- Subestructuras óptimas
- Memoización
- Dividir el problema en subproblemas más pequeños
- Resolver estos problemas de manera óptima usando este proceso de tres pasos recursivamente.
- Usar estas soluciones óptimas para construir una solución óptima al problema original.
Ejemplo. Fibonacci
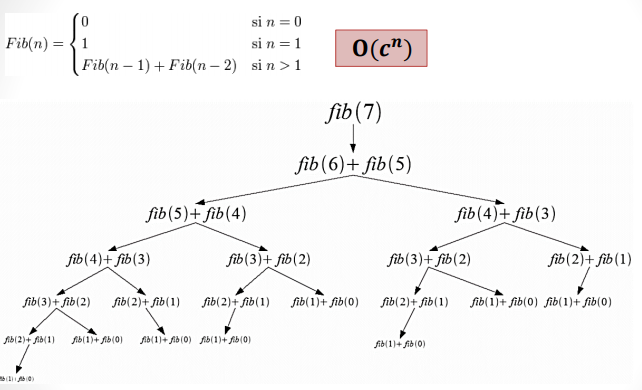
Si se llama a fib(5), se produce un árbol de llamadas que contendrá
funciones con los mismos parámetros varias veces:

Cuando se llega en el árbol a los casos base (señalados en la imagen)
evidentemente las llamadas a la función se detienen. Pero también
podemos notar que existen varios casos en donde se llama recursivamente
a números que ya fueron calculados, por ejemplo el 3.

Entonces para subsecuentes llamadas la cantidad de operaciones a calcular se
volverían exponenciales y la complejidad aproximada sería 𝑂(𝑐
𝑛
) lo cuál para
un n=20 ya es mucho que calcular (𝑂(
1+ 5^1/2 )/2
) ^𝑛≈ 15,127 llamadas a la función).
Originalmente, el término de programación dinámica se
refería a la resolución de ciertos problemas y
operaciones fuera del ámbito de la Ingeniería
Informática, al igual que hacía la programación lineal.
Aquel contexto no tiene relación con la programación en
absoluto; el nombre es una coincidencia. El término
también lo usó en los años 40 Richard Bellman, un
matemático norteamericano, para describir el proceso
de resolución de problemas donde hace falta calcular la
mejor solución consecutivamente.
Algunos lenguajes de programación funcionales, sobre
todo Haskell, pueden usar la memorización
automáticamente sobre funciones con un conjunto
concreto de argumentos, para acelerar su proceso de
evaluación. Esto sólo es posible en funciones que no
tengan efectos secundarios.
Memoizacion
Los subproblemas superpuestos provocan resolver
varias veces el mismo problema, ya que la solución de un
subproblema requiere calcular soluciones que otro
subproblema también tenga que calcular.
Perder tiempo calculando varias veces la solución al
mismo subproblema se puede evitar guardando las
soluciones que ya hemos calculado. Entonces, si
necesitamos resolver el mismo problema más tarde,
podemos obtener la solución de la lista de soluciones
calculadas y reutilizarla. Este acercamiento al problema
se llama memoización (Memoization en inglés) o
memorización se diferencia de 'memorización'
puesto que el término ya era usado en
matemáticas).
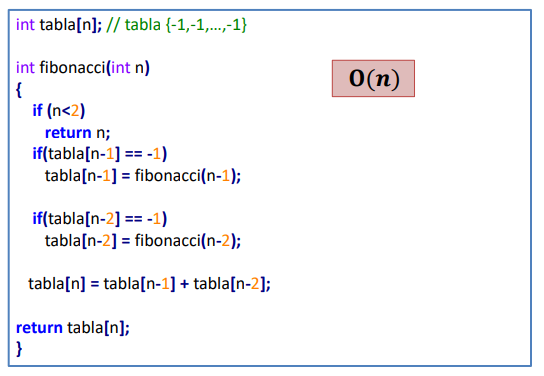
Se puede resolver el problema, utilizando el enfoque de memorización
(guardar los valores que ya han sido calculados para utilizarlos
posteriormente).
Así, rellenaríamos una tabla con los resultados de los distintos subproblemas,
para reutilizarlos cuando haga falta en lugar de volver a calcularlos. La tabla
resultante sería una tabla unidimensional con los resultados desde 0 hasta n.

En programación dinámica comúnmente se utilizan
tablas de resultados conocidos que se va generando a
medida que se resuelven los subcasos.

Subestructuras óptimas
Donde tiene mayor aplicación la Programación Dinámica
es en la resolución de problemas de optimización. En
este tipo de problemas se pueden presentar distintas
soluciones, cada una con un valor, y lo que se desea es
encontrar la solución de valor óptimo (máximo o
mínimo).
La solución de problemas mediante esta técnica se basa
en el llamado principio de óptimo enunciado por
Bellman en 1957 y que dice:
“En una secuencia de decisiones óptima toda
subsecuencia ha de ser también óptima”.
Enfoques de la programación dinámica
Top-down: El problema se divide en subproblemas, y
estos se resuelven recordando las soluciones por si
fueran necesarias nuevamente. Es una combinación de
memoización y recursión.
Bottom-up: Todos los problemas que puedan ser
necesarios se resuelven de antemano y después se usan
para resolver las soluciones a problemas mayores. Este
enfoque es ligeramente mejor en consumo de espacio y
llamadas a funciones, pero a veces resulta poco intuitivo
encontrar todos los subproblemas necesarios para
resolver un problema dado
Fibonacci utilizando programación dinámica (Top-Down)
Fibonacci utilizando programación dinámica (Buttom-Up)

Principio de optimalidad
Cuando hablamos de optimizar nos referimos a buscar
alguna de las mejores soluciones (solución optima) de
entre muchas alternativas posibles. Dicho proceso de
optimización puede ser visto como una secuencia de
decisiones que nos proporcionan la solución optima.
En este caso sigue siendo posible el ir tomando
decisiones elementales, en la confianza de que la
combinación de ellas seguirá siendo óptima, pero será
entonces necesario explorar muchas secuencias de
decisiones para dar con la correcta, siendo aquí donde
interviene la programación dinámica.
“En una secuencia de decisiones óptima toda
subsecuencia ha de ser también óptima”
Contemplar un problema como una secuencia de
decisiones equivale a dividirlo en problemas más
pequeños y por lo tanto más fáciles de resolver como
hacemos en Divide y Vencerás. La programación
dinámica se aplica cuando la subdivisión de un problema
conduce a:
- Una enorme cantidad de problemas
- Problemas cuyas soluciones parciales se solapan
- Grupos de problemas de muy distinta complejidad
Diseño de un algoritmo con programación dinámica
Para que un problema pueda ser abordado
por esta técnica ha de cumplir dos
condiciones:
1. La solución al problema ha de ser alcanzada a través de una secuencia de decisiones, una en cada etapa.
2.Dicha secuencia de decisiones ha de cumplir
el principio de optimalizad.
El diseño de un algoritmo de Programación
Dinámica consta de los siguientes pasos:
- Planteamiento de la solución como una sucesión de decisiones y verificación de que ésta cumple el principio de óptimo.
- Definición recursiva* o iterativa de la solución
- Cálculo del valor de la solución óptima mediante una estructura de datos en donde se almacenan soluciones a problemas parciales para reutilizar los cálculos.
- Construcción de la solución óptima haciendo uso de la información contenida en la estructura de datos.
Comentarios
Publicar un comentario